


概述
智能驾驶是当前汽车行业的研究热点。智能驾驶概念涵盖了传统的高级驾驶辅助系统(ADAS)以及全自动驾驶系统(SAE Level 3及以上级别)。由于智能驾驶系统的复杂性,仿真测试验证成为智能驾驶系统开发流程中必不可少的一个环节。
智能驾驶系统一般包括环境感知、智能决策及车辆控制三个部分,相应的,智能驾驶仿真测试环境需要包括道路交通场景仿真、车辆动力学仿真及传感器仿真。

系统特点
1、车辆动力学仿真
• 动力传动系统:可以模拟传统发动机动力系统、纯电驱动系统、混合动力系统、四轮驱动系统等多种形式
• 底盘系统:包括多种形式的悬架模型、复杂轮胎模型、转向系统模型、液压/气压制动系统模型以及多体车身动力学(纵向、侧向、垂向)模型
2、道路仿真
• 允许手动搭建各种类型的道路,支持OpenDrive标准高精度道路格式、支持OpenCRG高精度路面描述格式
• 支持复杂路网结构:三岔路口、十字路口、立交桥等
• 支持直接导入高精地图数据生成与真实道路高度一致的虚拟道路
3、交通仿真
• 可以模拟各种类型机动车、行人、动物等交通物体
• 可以自定义每个交通物体的驾驶行为,包括路径规划、速度控制、换道等,支持事件触发模式
• 可以生成符合交通规则的随机交通流
4、环境仿真
• 可以模拟晴天、多云、阴天、雨、雪等天气
• 可以模拟白天、黑夜等多种光照条件
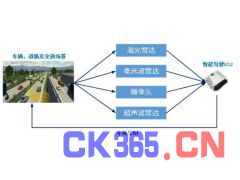
5、环境感知传感器仿真
• 对各类传感器均可提供理想环境感知传感器模型,直接输出目标级信息,包括交通物体的类型、位置、速度等信息,道路相关信息、交通标志信息等。
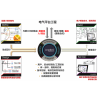
• 毫米波雷达仿真:可提供雷达回波模拟器系统(参见xxx),可集成真实毫米波雷达进行测试
• 摄像头:支持直接输出摄像头捕捉到的图像,提供视频暗箱或者图像直接注入两种HIL仿真方式
• 激光雷达:支持输出点云数据
• 超声波雷达:提供超声波回波模拟和芯片信号级模拟两种HIL仿真方式
• 支持多传感器融合
系统应用领域
ADAS决策及控制算法(AEB、ACC、APA、LKA等)的开发与验证
自动驾驶决策及控制的开发与验证
毫米波雷达功能测试和性能测试
图像感知算法的开发
激光雷达点云数据处理算法的开发
- 北京经纬恒润科技股份有限公司 [加为商友]

- 联系人许女士(女士)
- 地区北京
- 地址北京市海淀区知春路7号致真大厦6层