


CANFD介绍
CANFD总线于2011年由博世公司首次提出,在2015年国际标准化组织(ISO)正式发布支持CANFD的11898-1协议。与CAN总线相比较,CANFD主要优化了以下方面:
• 仲裁场和应答场速率最高可达1Mbps;数据场速率可变,根据具体的应用场景可以达到5Mbps或者更高;
• 数据场的长度可变,最大数据长度为64个字节。
综合以上几处优化,CANFD在以下几方面应用较有优势:
• 与传统CAN相比,更长的数据域,带宽利用率更高;
• 传输速率更快,就目前而言,正常通信时,可达到2Mbps的通信速率,如将原标准CAN网段替换为CANFD网段可有效降低原网段的负载率,下载时,可达5Mbps的通信速率,可有效提升下载效率;
• 可用于长度大于8个字节的信号的传输,例如PEPS的身份认证信号,在标准CAN中,需使用多条CAN报文传输,在CANFD中,只需一条CANFD报文即可。
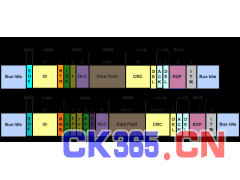
CANFD报文与CAN报文格式的区别如图1所示。
• CANFD报文新增了FDF(FD format)位,用于区分传统CAN报文和CANFD报文。BRS(bit-rate switch)位表示数据场的速率切换;ESI(error state indicator)位表示目前节点的错误界定状态;
• 考虑到数据场长度增加,为了提高通信的可靠性,CANFD设计了新的冗余校验机制;
• 除了ISO11898,ISO15765-2也针对CANFD的应用进行了更新,当前的诊断协议的传输层已支持CANFD报文格式。

图1.CANFD报文与CAN报文格式对比
Bootloader设计与实现
• 系统概述
如图2所示,整套刷新系统主要包括Bootloader上位机、刷写工具以及集成Bootloader下位机软件的控制器。用户通过上位机的交互界面进行传输速率、请求ID等设置并加载需要更新的控制器软件程序。Bootloader下位机软件接收上位机传递的数据并写入到控制器的Flash存储器中,实现控制器的在线刷新。刷写工具主要用于CANFD报文传输。
图2.系统结构图
• 硬件实现
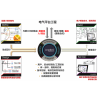
本实验中,开发了带CANFD接口的控制器。图3给出了控制器在CANFD收发器端的硬件原理框图。系统控制器选用瑞萨RH850 F1H系列芯片,该芯片支持6路CANFD,CANFD收发器选用NXP公司的TJA1044GT。为保证控制器的EMC性能以及网络系统要求,收发器需匹配合适的外围电路,包括终端电阻、终端电容及共模电感等。
图3.RH850F1H端CANFD收发器原理图
• 软件实现
♦ Bootloader下位机软件
Bootloader软件基于HIS协议开发。Bootloader软件架构采用分层模块,能够尽量降低模块之间耦合,提高开发效率和质量。
Bootloader软件主要由CANFD Driver、CANFD TP和DCM三部分组成,CANFD Driver模块实现CANFD控制器和收发器硬件初始化以及CANFD报文收发,CANFD TP主要实现ISO 15765-2协议以及诊断报文的处理,DCM模块实现ISO14229中与程序下载相关的服务。
图4.Bootloader软件架构
Memory Operation Module负责控制器内存逻辑块配置、分段处理和非易失性数据管理。Security Module负责安全访问算法和数据完整性算法。Runtime Environment实现诊断协议的回调处理和控制整个系统的运行。上层的Bootloader Manager负责应用程序和Bootloader启动处理及Stay In Boot功能。Bootloader Application实现时钟配置、时间片处理及中断重映射功能。
♦ Bootloader上位机软件
图5.Bootloader上位机配置界面
上位主要功能为系统设置和软件升级两部分。系统设置中可以进行仲裁场波特率设置、数据场波特率设置、通信通道选择、请求和响应ID设置、ID类型选择。为保证传输数据有效,上位机中设置有CRC校验算法和安全访问算法的输入,CRC校验用以保证数据传输的完整性,安全访问算法与下位机中的安全访问算法保持一致。软件升级主要为驱动文件选择和需要刷新的数据文件的添加。
ECU刷新实验
为了验证基于CANFD总线的软件刷新效率,分别基于CANFD总线和CAN总线的Bootloader软件进行了八组刷写实验。
图6.ECU软件刷新实验
表1.基于CANFD和CAN总线的刷写速率对比
如表1所示,CANFD总线仲裁场设置速率为500kbps,数据场速率设置为5Mbps, CAN总线的通信速率设置为500kbps。 刷写数据范围从420kb到3392kb,对比实验数据可知基于CANFD的刷写效率相对普通CAN 分别提升保持在300%之上。
总结
本文介绍了基于CANFD的Bootloader软硬件设计及实现,通过实验验证相对于传统的基于CAN总线刷新方式,基于CANFD总线的刷新效率有较大的提高。目前车载网络架构一般会根据控制器的功能分为多个网段,各个网段之间通过网关交互信息。在未来车载控制器刷新中可以充分利用CANFD的带宽,实现基于网关的多路控制器同时刷新。
恒润科技
北京市海淀区知春路7号致真大厦D座5-10层
邮编:100191
电话:010-64840808
- 北京经纬恒润科技股份有限公司 [加为商友]

- 联系人许女士(女士)
- 地区北京
- 地址北京市海淀区知春路7号致真大厦6层