随着汽车电子产业的不断发展,为保证驾驶员的舒适性与安全性,很多与主动安全相关的控制器被研发出来,比如车辆无人驾驶系统、自动泊车系统、自动巡航系统、车道偏离预警系统、盲区监测系统等。这些系统将对车辆进行不同程度的干预,而这种干预若是出现错误将导致难以想象的结果,因此对于这些驾驶辅助系统的功能测试以避免错误干预的情况出现就显得尤为重要[1]。
目前,常采用HIL(Hardware-in-the-Loop,硬件在环)设备对与主动安全相关的控制器进行性能测试。在采用HIL设备进行测试的系统中只有被测控制器是真实的,与被测控制器相关的汽车的车辆动力学、道路、驾驶员、动力、传动等系统都是虚拟的,需要通过仿真模型来模拟汽车的车辆动力学、道路、驾驶员、动力、传动等系统。但是由于采用HIL设备进行测试为实时测试,为保证仿真模型计算的实时性,在现有的计算机计算水平的基础上,仿真模型只能是一种较为简化的模型,因此模拟出来的汽车的车辆动力学、道路、驾驶员、动力、传动等系统为较为简化的系统,导致被测控制器的性能测试结果的精确度不高。又由于通过仿真模型模拟出的汽车的车辆动力学、道路、驾驶员、动力、传动等系统与真实汽车的车辆动力学、道路、驾驶员、动力、传动等系统存在偏差,因此进一步降低了被测控制器的性能测试结果的精确度。
对测试来说最精确的环境无疑是进行实车测试,而实车测试的存在测试时间、人力、场地等成本高、变换不同场景费时费力、有人参与的情况下安全较难保、;随机因素多可重复性低等问题。因此一种介于硬件在环与实车测试之间的测试方法,实车在环测试,可以帮助解决这一系列问题。通过实车在环测试可以至少节省80%的时间[2],同时可以大幅度节约成本,减少危险事件的发生的概率,重复同样的测试条件进行多次试验。
实车在环概述
实车在环是指通过实时仿真机仿真模拟道路、交通场景和传感器,将真实的车辆置于其中进行测试的方法,可实现功能验证、各场景仿真测试、整车电控系统的匹配及联合运行。

实车在环实现效果图
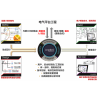
实车在环系统方案如下:实时仿真机仿真模拟交通环境;接收汽车定位装置获取的实车的第一运动状态信息;依据第一运动状态信息、模拟交通环境,计算出控制器传感器信号;发送控制器传感器信号至实车内的被测控制器;获取被测控制器针对控制器传感器信号输出的控制信号、实车控制器响应控制信号后输出的信号,接收实车的第二运动状态信息和交通环境等信息,作为被测控制器的性能测试的分析依据。
实车在环系统方案
与传统的硬件在环HIL测试相比实车在环VIL提高了被测控制器的性能测试结果的精确度,与实车测试相比,节约成本,降低测试风险,增强了测试的复现性,弥补了实车测试与硬件在环测试之间的鸿沟。实车在环有如下优势:
Ø 实现快速的场景及驾驶测试,高效的验证各控制器的功能
Ø 降低实车测试的难度和风险,减少交通事故和风险
Ø 减少对场地,真实交通和试验车辆的需求,可复用MIL和HIL测试的测试场景。
可以在基于V流程进行驾驶员辅助系统开发的MIL,SIL,HIL以及场地测试各个阶段一致且持续的使用。
实车在环实施方案
本实施方案为作者所在团队为国内某自主品牌车厂搭建的实车在环方案,目的是为了测试其开发的与主动安全相关的驾驶辅助系统在其旗下某车型上的应用,其系统硬件方案如图 4所示。
实车在环硬件系统
(1-传感器单元,2-实时系统单元,3-惯性测量单元,4-电池单元)
• 惯性测量单元
本文所采用的差分式定位系统(DGPS)是指利用设置在坐标已知的点(基准站)上的GPS接收机测定GPS测量定位误差,用以提高在一定范围内其他GPS接收机(流动站)测量定位精度的方法。DGPS的定位精度可以达到米级,在较小范围内精度可以达到1~2cm[3]。通过精准的DGPS定位,获取车辆的位置信息,通过惯性测量单元IMU计算出车辆速度、加速度和偏航角信息,为实时仿真系统提供第一运动状态,根据该状态来更新仿真环境中车辆的状态。
由于市面上的DGPS设备的刷新频率均低于实时系统的计算频率1kHz,因此,对于采集到的运动状态信息采用(式1-3)[1]的拟合方法进行处理,以满足实时系统的要求,防止仿真位置出现跳变影响计算结果。
其中, 为当前时刻的速度; 为上一步长速度; 为测量的加速度; 为惯性测试单元当前发送给实时系统中的位置; 为上一步长发送给实时系统中的位置; 为测量的位置与输入到实时系统中的位置的差值;k为误差调节参数。通过对误差调节参数k的调节,可以使输入到实时系统的位置信息更加连贯且接近真实位置。
• 虚拟仿真环境
通过仿真软件来进行虚拟交通测试环境的搭建,包括不同的车道与车道线、静止和运动的交通车辆、行人、交通标志、障碍物、虚拟或真实传感器信息。实际车辆在一个广阔安全的平地运行时,通过GPS进行位置的传输和惯性测量单元对车辆状态的计算与传输,在虚拟环境中的车辆也同步地在运行。
本文采用的CarMaker是一款成熟的车辆仿真软件,可以通过简单的步骤搭建复杂的道路和交通物体,其事件触发的机制以及自动驾驶功能可以进行复杂交通情景的搭建。CarMaker中提供多种视角切换,其中包含一种在驾驶员处的视角,通过IPGMovie把该视角投射到放置在驾驶员前方的显示屏,模拟逼真的驾驶环境。
虚拟仿真环境示意图
• 实时仿真机
实时仿真机的作用是提供实时运行的仿真环境并且实现虚拟与真实信号的交互。在实时仿真机上运行的是虚拟的交通测试环境,当获取了车辆的第一运动状态信息后可以计算出车辆在交通环境中与交通物体的相对位置、所处道路的位置等,这些信息将转换成传感器信息作为输入传输给被测驾驶辅助系统,保证被测驾驶辅助系统所获得的传感器信息与真实交通场景中的一致。
本文采用RoadBox实时仿真硬件平台,RoadBox可提供与实车和各控制器的电气(数字信号与模拟信号)和通讯(LIN、CAN、Flexray)接口。它主要包括:cPCI机箱,用于集成;实时处理器,用于模型的实时运行;IO板卡,用于与控制器,车辆信号的交互。
• 传感器的仿真
用于驾驶辅助系统的传感器主要是计算车辆本身与周围环境相对关系的传感器,下面分别介绍毫米波雷达传感器、摄像头传感器在实车在环中的仿真方案。
(1)毫米波雷达传感器
毫米波雷达传感器采用CarMaker的雷达传感器模拟,输出雷达总成信号(例如多个目标物体的位置、相对速度等),通过CAN总线直接发给驾驶辅助系统。CarMaker中可以添加最多30个雷达传感器、雷达位置可以任意设置、雷达的照射开度及有效距离也可以被定义,具有很高的灵活性,且每个雷达均可输出实时更新的多目标信息列表。
毫米波雷达传感器仿真方案
(2)摄像头
摄像头采用虚拟摄像头搭配视频接口盒方案。在CarMaker中可以可定义最多10个虚拟摄像头,每个虚拟摄像头的位置、方向、视角、形式、帧特率等都可以单独设置。CarMaker提供一种输出视频数据的工具Video Data Stream(VDS),它可以将安装于车辆不同位置的虚拟摄像头捕捉到的IPGMovie的图像以不同的格式输出。通过VDS输出的视频数据经过视频接口盒(Video Interface box)进行处理,并将信号处理成驾驶辅助系统可用的信号格式,其方案如图 7所示。
摄像头模拟方案
• 真实车辆
真实的车辆包括车辆及电控系统,运行在一个宽阔安全的平地上,对被测的驾驶辅助系统来说其实际是运行在预先设定的交通测试环境中(如图 7)。被测系统在接收到传感器信号后据此进行计算,经过计算后将对车辆进行干预的控制信号发到车辆总线中,由真实驾驶员操纵的车辆在收到总线上的控制信号后执行对车辆的控制,从而改变车辆的状态。车辆本身传感器计算出其状态与惯性测量单元测到的车辆实时状态一起发送到实习仿真机中,将第一运动状态更新成第二运动状态,实时仿真机以此进行第二轮计算。如此,每个计算步长都将产生这样的循环。
测试环境
结论
由上述的方案来看,实车在环一是可以应用于被测控制器的功能和性能测试,在算法开发阶段也实车在环也可以用以测试算法原型机。
由于使用的是实际的车辆,因而减少了对车辆动力学模型的参数标定,使测试结果更加精确;其虚拟场景可以使用最初算法开发以及HIL测试时的交通场景,也可以根据一些交通事故来确定测试场景,场景的切换过程较实车测试简单程度大幅度提升;由于是主动安全性测试,其虚拟的场景可以避免事故的发生,也可以节约不必要的器材损失;其可重复性很高,在大量重复的实车在环测试后后续的实车测试可以省去这些环境,仅需进行随机场景测试。
未来展望:
出于对安全性的考虑,该方案还可以应用与半自动或自动驾驶车辆的开发工作;由于不同驾驶员的操作风格不同,即使同一个驾驶员在不同组的试验中对车辆的操作也会不同,因此未来还可以引入驾驶员模型,由虚拟驾驶员进行车辆的控制。
- 北京经纬恒润科技股份有限公司 [加为商友]

- 联系人许女士(女士)
- 地区北京
- 地址北京市海淀区知春路7号致真大厦6层